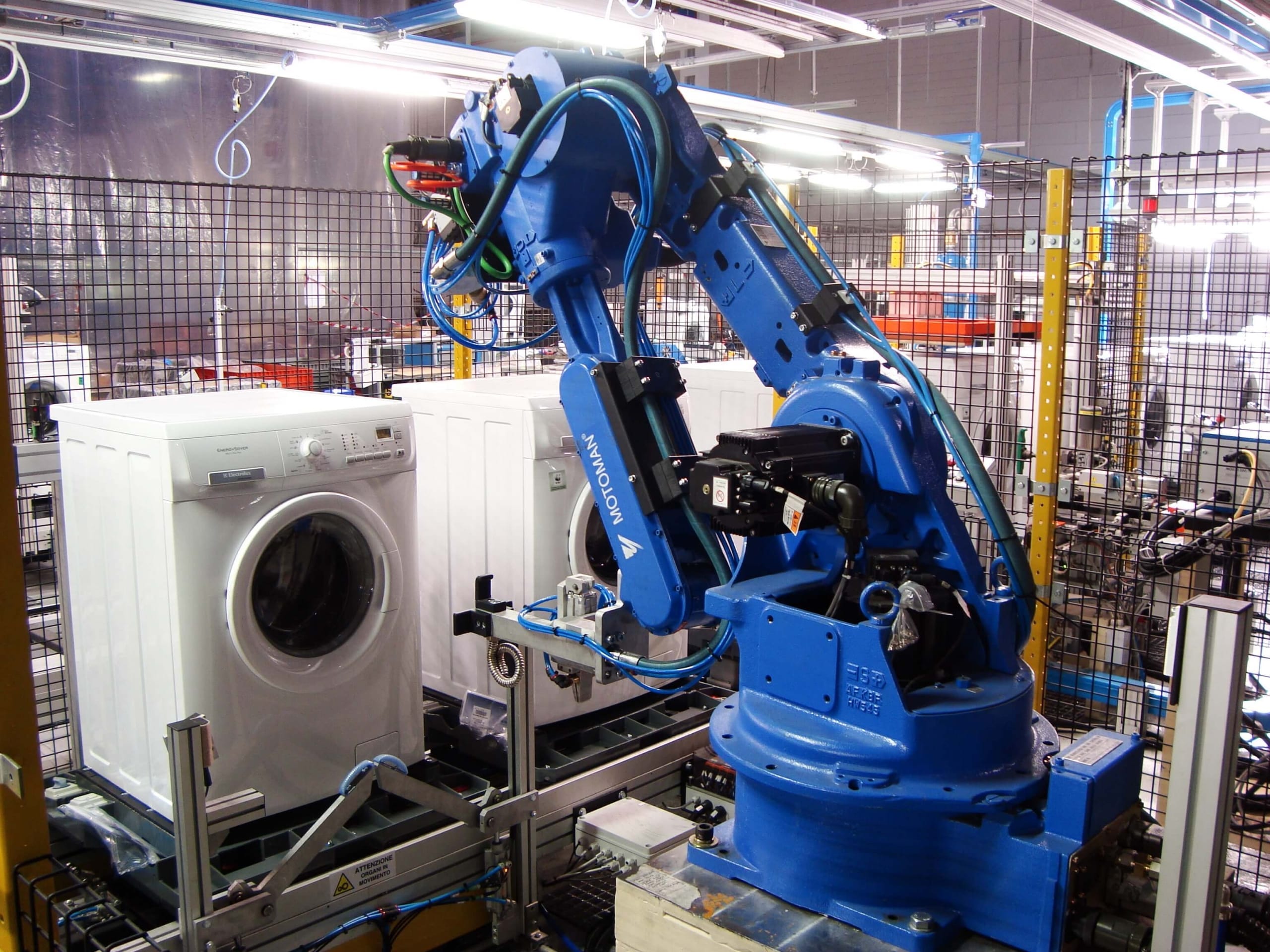
Roboty mogą ponadto wykonywać prace w środowiskach określonych jako „nieprzyjazne”, oszczędzając operatorom wykonywania prac niebezpiecznych i uciążliwych, przez co zwiększają poziom bezpieczeństwa.
Transport, który opiera się na zespole algorytmów kinematycznych, jest nadzorowany przez centralne sterowanie elektroniczne, zazwyczaj charakteryzujące się dużą wytrzymałością, aby mogło być stosowane w najsurowszych środowiskach przemysłowych. Automatyczne działanie robota zarządzane jest w języku programowania strukturalnego, co pozwala sterować całym cyklem automatycznym, archiwizować dane produkcyjne i modyfikować parametry maszyny (anomalie, uruchomienie, zatrzymanie, ustawienia konfigurowalne, itp.).