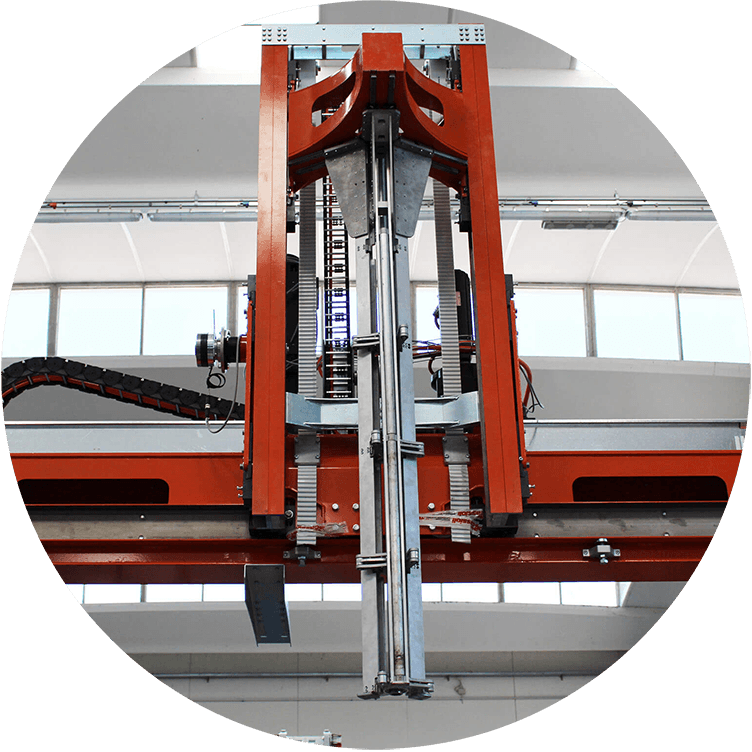
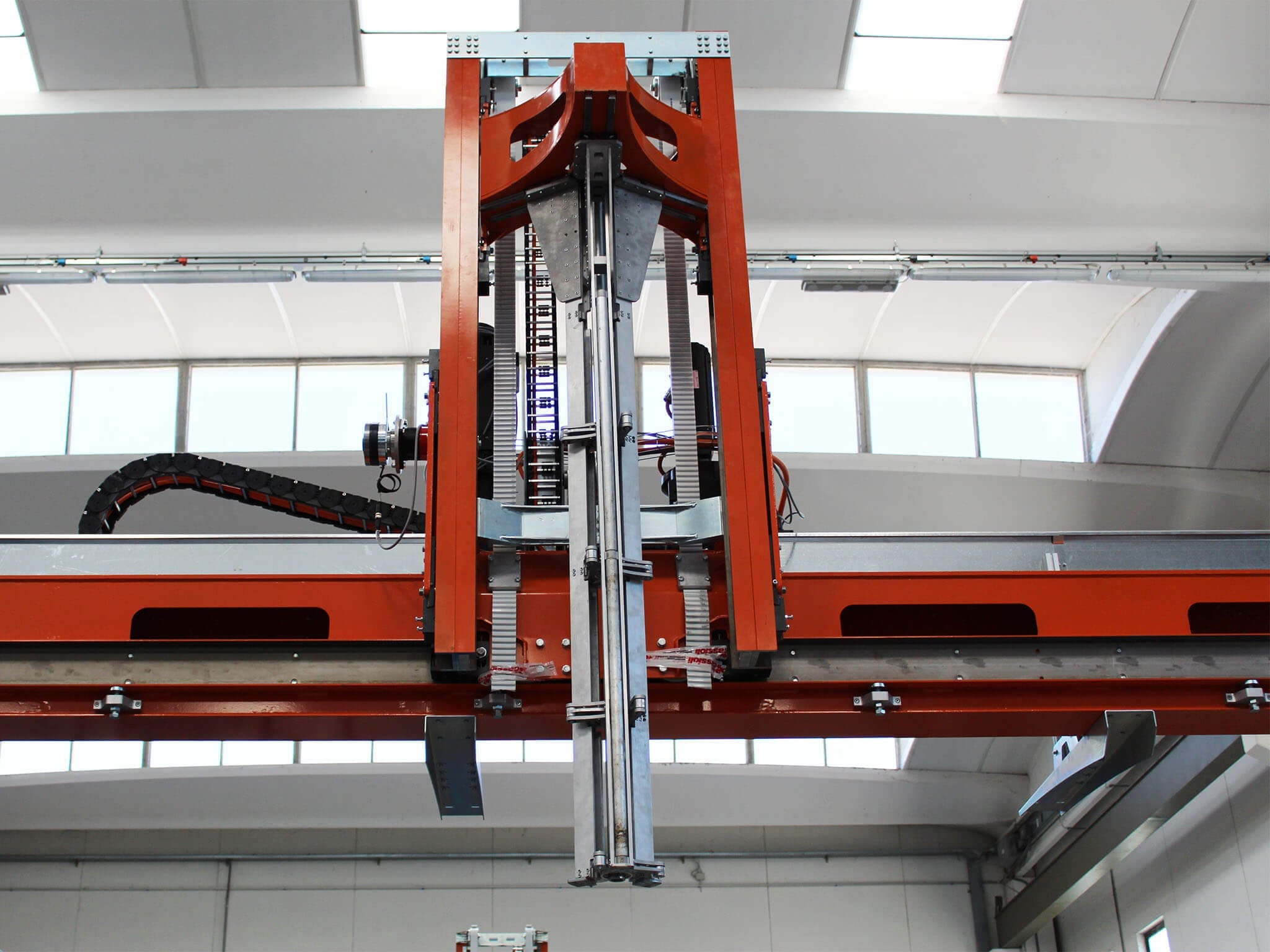
Портальный робот представляет собой декартовый манипулятор Cassioli с электроприводом для интенсивного складирования шин. Внутри зоны укладки на палеты могут работать несколько портальных роботов, они забирают шины, поступающие в произвольном порядке на входном транспортере, и штабелируют их на полу по одной в соответствии с кодом изделия. Каждый портальный робот обслуживает свой участок в зоне складирования. Точное управление и надежный контроль машины гарантируются полным согласованием трех основных аспектов автоматизации: механического оборудования, электрической системы и программы управления. Поскольку портал подвешен в воздухе, он является идеальным решением для оптимизации пространства: эта конкретная машина может одновременно работать с шинами разного размера.
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
Повышенная эффективность и оптимизация производственных потоков
Применение 2 синхронизированных серводвигателей для достижения высокой скорости и ускорения
Особая конструкция захвата для взятия стопки шин без нарушения качества продукции
Исключительная аккуратность в обращении с перемещаемым изделием
Программное обеспечение может управлять и оптимизировать поступление и выход в зоне складирования, передавать информацию в реальном масштабе времени с целью контроля и проверки процесса изготовления каждой шины в отдельности
Кастомизация и гибкость с учетом запросов клиента
ФОТОГАЛЕРЕЯ
GANTRY APPLICATIONS
Скачать брошюру
This site is registered on wpml.org as a development site. Switch to a production site key to remove this banner.